| Funding Agency | THE SCIENTIFIC AND TECHNOLOGICAL RESEARCH COUNCIL OF TURKEY (TÜBİTAK) | 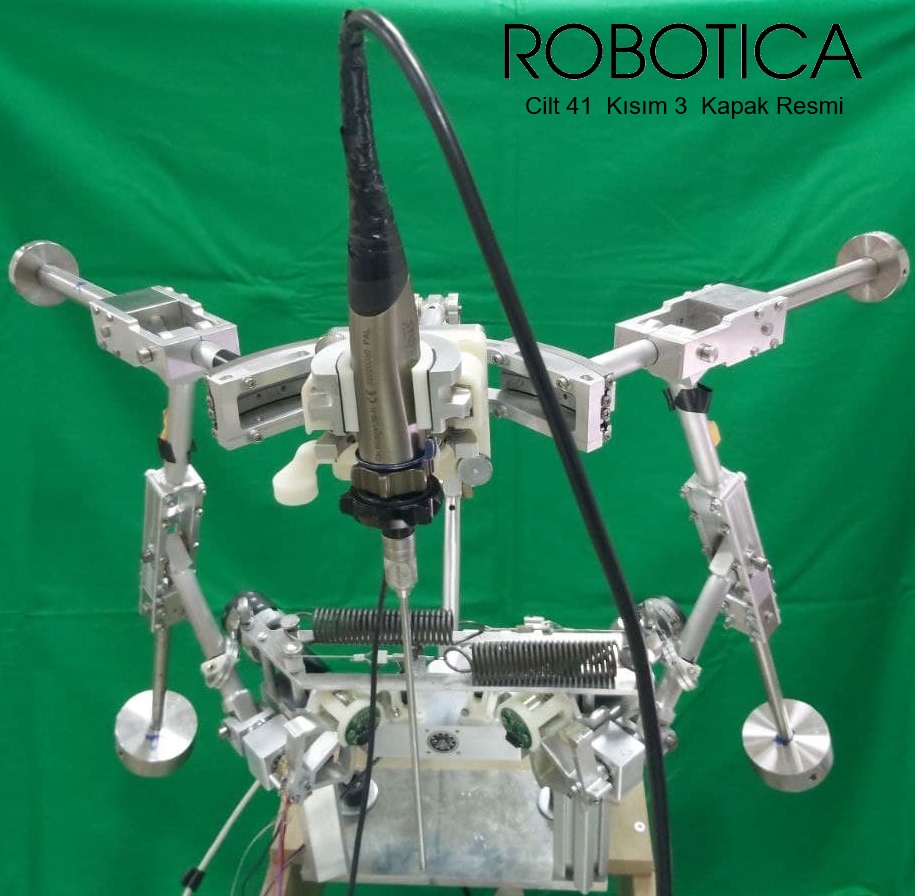
|
| Program | 1001 | |
| ID/Acronym | 219M483 / BalanScope | |
| Grant Period | 2020-2023 | |
| Principal Investigator | Dr. Gökhan Kiper | |
| Project Group | Dr. M. İ. Can Dede, Dr. H. Seçil Artem, Dr. Levent Aydın, Dr. Volkert van der Wijk, Dr. Mustafa Berker, Dr. Şahin Hanalioğlu, Dr. İlkay Işıkay, İbrahimcan Görgülü, Ataol B. Aldanmaz, H. İrem Erten, Tuğrul Yılmaz, Emirhan İnanç, Rüstem Can Öztürk, Hüseyin Cengiz, Hande Parlak, Tarık Kadak, Batuhan Özkurt, Musa Uzun |
Pituitary gland is a special endocrine organ located in between the two optic nerves on the skull base. The project is on developing endoscope holding systems to be used in pituitary gland tumor surgery. In the TÜBİTAK-supported NeuRoboScope project that was completed in 2018, the first prototype of a special robotic system was developed which allows the surgeon direct the imaging tool (endoscope) via teleoperation. The telescope of the endoscope should move around a point at the entrance to the nostril. Mechanisms whose end-effector can move around a point in this way are called mechanisms with a remote center of motion (RCM). The aim of the project is to develop gravity balanced endoscope holder mechanisms for both
Safety reasons and ease of actuation. Also for safety purposes, series-elastic actuators (SEA) are designed with a softening spring system between the motors and the actuated links.
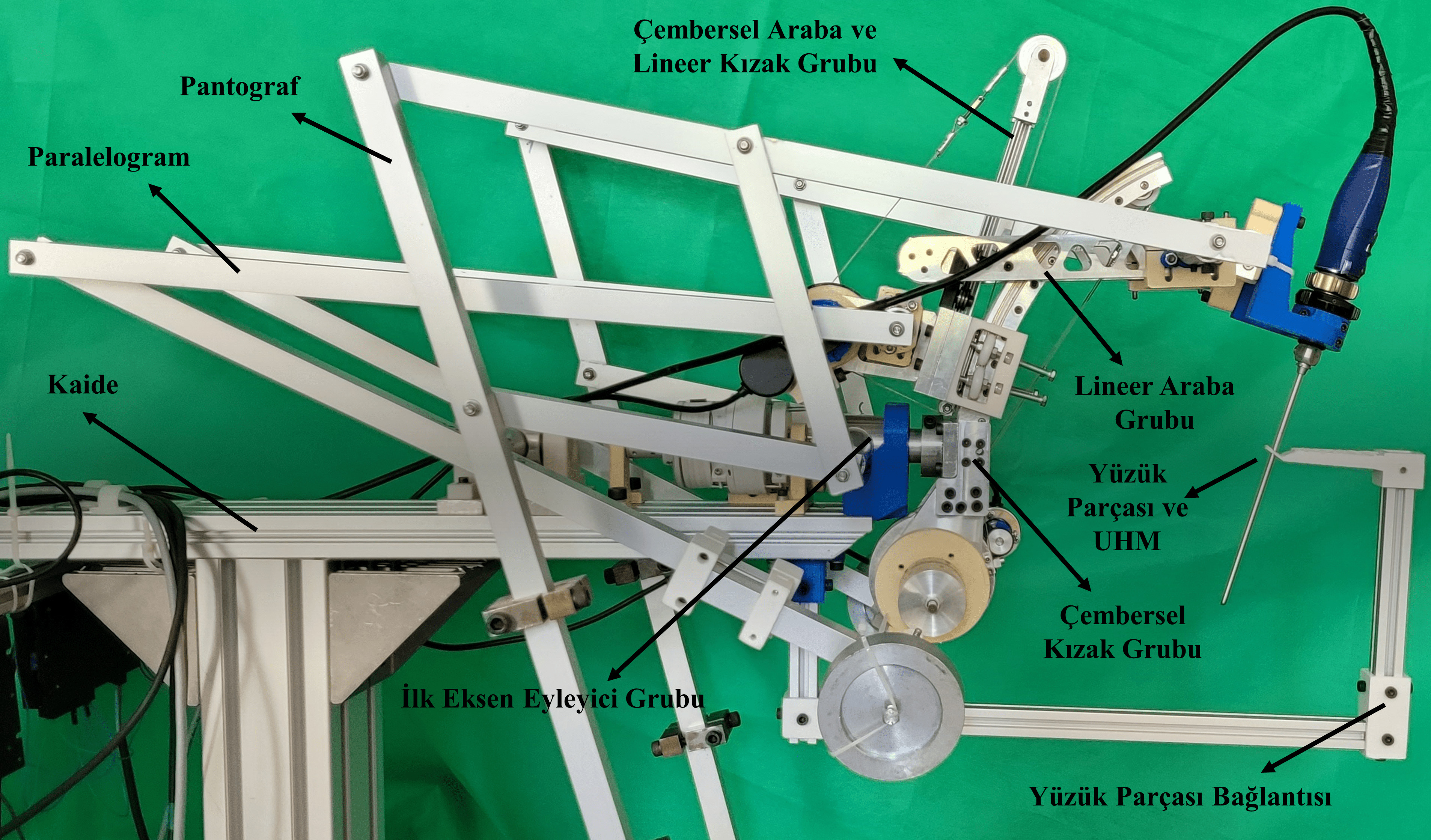
Two solution alternatives were studied in parallel. In the first solution, the gravity balancing of the parallel manipulator produced in the NeuRoboScope project was performed. In the second solution, a new RCM mechanism with serial kinematic architecture was developed, and this mechanism was gravity balanced by using parallelogram loops and counter-masses. Balanced prototypes of both mechanisms were produced and performance tests were carried out.
Both mechanisms are able to remain balanced within the targeted working space. The new UHM mechanism can be driven back with one hand by holding the endoscope, and can be braked in the desired position thanks to balancing and motors. It is aimed that the endoscope can rotate around the UHM at least 33.9° in one axis and at least 36.7° in the other axis, providing approximately 40° rotation in both axes. The maximum distance of the endoscope tip to the UHM was ensured to be 110 mm. In the constructional design, it was ensured that the telescope tip deflection values remained below 0.5 mm at any position of the mechanism. When not under force, the distance of the axis of the endoscope telescope to the UHM in the surgery area was ensured to be less than 1 mm. The accuracy of force/moment measurements of SEEs remained within the 10% error band. As a result of the production, the total mass of the existing UHM mechanism is 10 kg, the total mass of the new UHM mechanism is 11.6 kg, and the target of keeping the total mass of the manipulator below 15 kg has been achieved. It is planned to continue working with surgeons using the endoscope holder manipulators obtained.
Alzanmaz AB, Ayit O, Kiper G, Dede MİC (2023) Gravity compensation of a 2R1T mechanism with remote center of motion for minimally invasive transnasal surgery applications, Robotica, 41(3):807-820
Yılmaz T, Kiper G (2023) Design and balancing of a novel 2R1T manipulator with remote center of motion, In: MA Laribi, CA Nelson, MC, S Zeghloul (Ed), New Advances in Mechanisms, Transmissions and Applications: Proceedings of the Sixth MeTrApp Conference 2023, Springer, 180-188
Görgülü İ, Dede MİC, Kiper G (2023) Ameliyat robotları için seri elastik eyleyici tasarımı ve testleri. 21. Ulusal Makina Teorisi Sempozyumu (UMTS 2023), Edirne, September 13-15, 2023
Yılmaz T, Kiper G (2023) Uzak hareket merkezli yeni bir manipülatörün prototip imalatı. 21. Ulusal Makina Teorisi Sempozyumu (UMTS 2023), Edirne, September 13-15, 2023
Yılmaz T, Kiper G, Dede MİC (2023) A Novel Endoscope Manipulator with Remote Center of Motion. Submitted to journal.
MSc Thesis by Tuğrul Yılmaz: Design, Production and Tests of an Inherently Balanced Mechanism to be Used as an Endoscope Holder for Endonasal Skull Base Surgery (Completed on July 2023 – Supervised by Dr. Kiper and Dr. Van der Wijk)
MSc Thesis by H. İrem Erten: Design of Series-elastic Actuator using Topology Optimization (Completed on December 2021 – Supervised by Dr. Artem)
MSc Thesis by Ataol B. Aldanmaz: Gravity Compensation of a 2R1T Mechanism With Remote Center of Motion for Minimally Invasive Transnasal Surgery Applications (Completed on September 2021 – Supervised by Dr. Kiper and Dr. Dede)
BSc Study (TÜBİTAK STAR scholarship) – Emirhan İnanç: Research on Mechanisms with 2R Remote Center of Motion (Completed on July 2021 – Supervised by Dr. Kiper)
BSc Study (TÜBİTAK STAR scholarship) – Hüseyin Cengiz: Research on Remote Center of Motion Mechanisms (Completed on September 2022 – Supervised by Dr. Dede)
BSc Study (TÜBİTAK STAR scholarship) – Hande Parlak: Research on Series Elastic Actuators (Completed on December 2022 – Supervised by Dr. Aydın)
BSc Study (TÜBİTAK STAR scholarship) – Musa Uzun: Research on Mechanism Tests (Completed on October 2023 – Supervised by Mr. Görgülü)
Special Session on Medical Applications was organized on September 13, 2023 during 21st National Theory of Machines Symposium in Trakya University.