| Destekleyen Kuruluş | TÜRKİYE BİLİMSEL VE TEKNOLOJİK ARAŞTIRMA KURUMU (TÜBİTAK) | 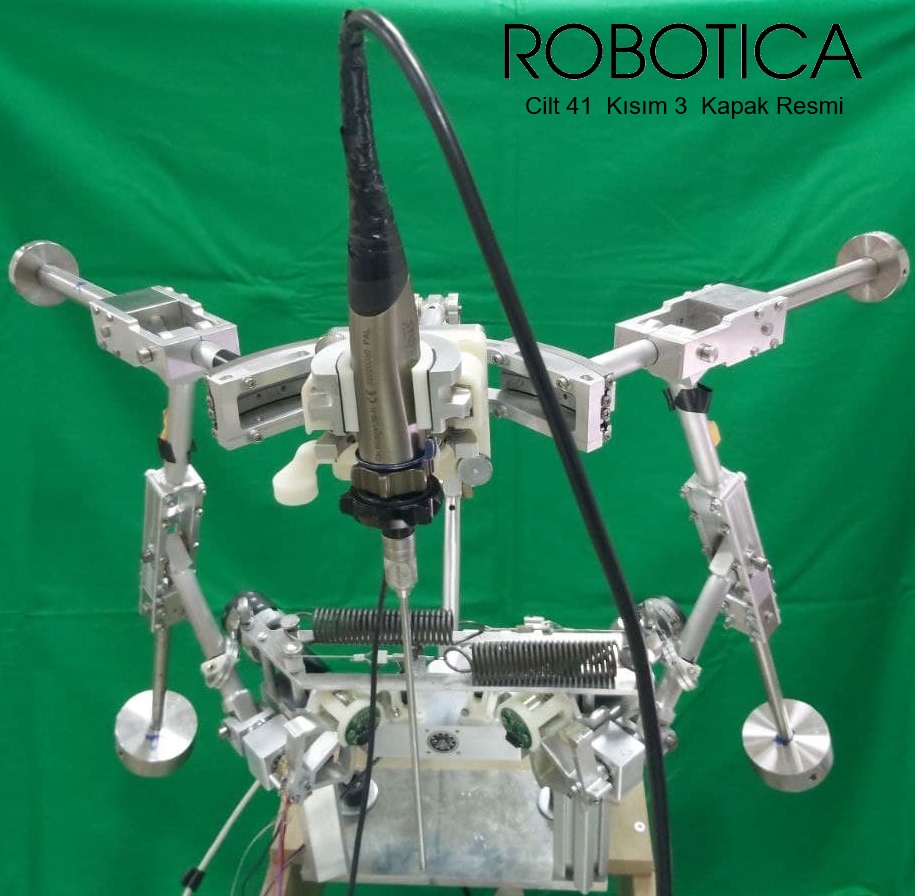
|
| Destek Programı | 1001 | |
| Proje No/Kısaltması | 219M483 / BalanScope | |
| Destek Süresi | 2020-2023 | |
| Yürütücü | Dr. Gökhan Kiper | |
| Proje Ekibi | Dr. M. İ. Can Dede, Dr. H. Seçil Artem, Dr. Levent Aydın, Dr. Volkert van der Wijk, Dr. Mustafa Berker, Dr. Şahin Hanalioğlu, Dr. İlkay Işıkay, İbrahimcan Görgülü, Ataol B. Aldanmaz, H. İrem Erten, Tuğrul Yılmaz, Emirhan İnanç, Rüstem Can Öztürk, Hüseyin Cengiz, Hande Parlak, Tarık Kadak, Batuhan Özkurt, Musa Uzun |
Hipofiz bezi iki görme sinirinin arasında kafa tabanında özel bir salgı organıdır. Proje, hipofiz bezi tümör ameliyatlarında kullanılmak üzere endoskop tutucu sistemler geliştirilmesi üzerinedir. 2018 yılında tamamlanan TÜBİTAK destekli NeuRoboScope projesi ile bu ameliyatlarda kullanılan görüntüleme aracını (endoskop) cerrahın istediği şekilde yönlendirilmesine yarayan özel bir robotik sistemin ilk prototipi geliştirilmiştir. Endoskop teleskopunun burun deliği girişinde bir nokta etrafında hareket etmesi gerekmektedir. Uç işlemcisi bu şekilde bir nokta etrafında hareket edebilen mekanizmalara uzak hareket merkezli (UHM) mekanizma denmektedir. Hem ameliyat güvenliği, hem de eyletim kolaylığı için endoskop tutucu mekanizmanın yerçekimine karşı dengeli olması hedeflenmiştir. Yine güvenlik amaçlı olarak motorlarla eyletilen uzuvlar arasına bir yumuşayan yay sistemi olacak şekilde seri-elastik eyleyicilerin (SEE) tasarımı hedeflenmiştir.
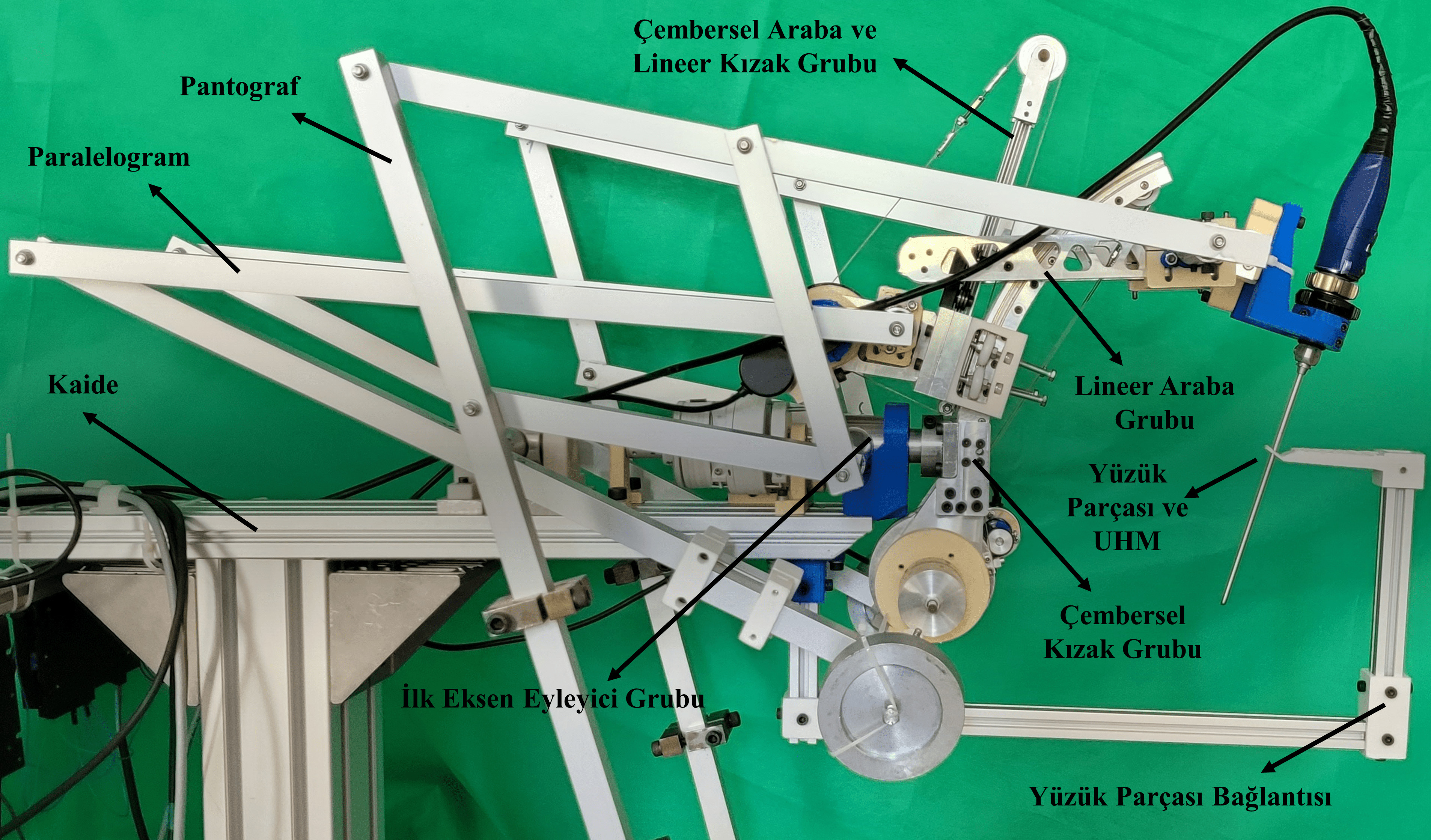
Projede iki çözüm alternatifi paralel çalışılmıştır. İlk çözümde NeuRoboScope projesinde üretilmiş olan paralel manipülatörün ağırlık dengelemesi yapılmıştır. İkinci çözümde ise seri kinematik mimarili yeni bir UHM mekanizması geliştirilmiş, bu mekanizma paralelkenar devreleri ve karşıt kütleler kullanılarak yerçekimine karşı dengeli hale getirilmiştir. Her iki mekanizmanın dengelenmiş prototipi üretilmiş ve performans testleri yapılmıştır.
Yapılan dengeleme testlerinde iki mekanizmanın da hedeflenen çalışma uzayı içinde dengeli kalabildikleri görülmüştür. Yeni UHM mekanizması endoskoptan tutularak tek el ile ger sürülebilmekte, dengeleme ve motorlar sayesinde istenilen konumda frenlenebilmektedir. Endoskopun UHM etrafında bir eksende en az 33.9° ve diğer eksende en az 36.7° dönebilmesi hedeflenmiş, her iki eksende yaklaşık 40° dönüş sağlanmıştır. Endoskop ucunun UHM’ye maksimum uzaklığının 110 mm olması sağlanmıştır. Yapılan konstrüksiyonel tasarımda mekanizmanın herhangi bir konumunda teleskop ucu sehim değerlerinin 0.5 mm altında kalması sağlanmıştır. Kuvvet altında değilken ameliyat bölgesinde endoskop teleskopunun ekseninin UHM’ye uzaklığının 1 mm altında olması sağlanmıştır. SEElerin kuvvet/moment ölçümlerinin doğruluğu %10 hata bandında kalmıştır. Üretimler sonucunda mevcut UHM mekanizması toplam kütlesi 10 kg, yeni UHM mekanizması toplam kütlesi 11.6 kg olup manipülatör toplam kütlesinin 15 kg altında olması hedefi sağlanmıştır. Elde edilen endoskop tutucu manipülatörler kullanılarak cerrahlarla çalışmalara devam edilmesi planlanmaktadır.
Alzanmaz AB, Ayit O, Kiper G, Dede MİC (2023) Gravity compensation of a 2R1T mechanism with remote center of motion for minimally invasive transnasal surgery applications, Robotica, 41(3):807-820
Yılmaz T, Kiper G (2023) Design and balancing of a novel 2R1T manipulator with remote center of motion, In: Laribi MA, Nelson CA, Ceccarelli M, Zeghloul S (Ed), New Advances in Mechanisms, Transmissions and Applications: Proceedings of the Sixth MeTrApp Conference 2023, Springer, 180-188
Görgülü İ, Dede MİC, Kiper G (2023) Ameliyat robotları için seri elastik eyleyici tasarımı ve testleri. 21. Ulusal Makina Teorisi Sempozyumu (UMTS 2023), Edirne, 13-15 Eylül 2023
Yılmaz T, Kiper G (2023) Uzak hareket merkezli yeni bir manipülatörün prototip imalatı. 21. Ulusal Makina Teorisi Sempozyumu (UMTS 2023), Edirne, 13-15 Eylül 2023
Yılmaz T, Kiper G, Dede MİC (2023) A Novel Endoscope Manipulator with Remote Center of Motion. Dergiye gönderildi.
Y. L. Tezi – Tuğrul Yılmaz: Endonazal Kafa Tabanı Ameliyatı İçin Endoskop Tutucu Olarak Kullanılacak, Kendinden Dengeli Bir Mekanizma Tasarımı, Üretimi ve Testleri (Temmuz 202’3te tamamlandı – Danışmanlar: Dr. Kiper ve Dr. Van der Wijk)
Y. L. Tezi – H. İrem Erten: Topoloji Optimizasyonu Kullanarak Seri-elastik Eyleyici Tasarımı (Aralık 2021’de tamamlandı – Danışman: Dr. Artem)
Y. L. Tezi – Ataol B. Aldanmaz: Minimal İnvaziv Transnazal Cerrahi Uygulamaları İçin Uzak Hareket Merkezli 2R1T Paralel Mekanizmasının Yerçekimi Dengelenmesi (Eylül 2021’de tamamlandı – Danışmanlar: Dr. Kiper ve Dr. Dede)
Lisans Çalışması (TÜBİTAK STAR bursu) – Emirhan İnanç: 2R Uzaktan Hareket Merkezli Mekanizmaların Araştırılması (Temmuz 2021’de tamamlandı – Danışman: Dr. Kiper)
Lisans Çalışması (TÜBİTAK STAR bursu) – Hüseyin Cengiz: Uzaktan Hareket Merkezli Mekanizmalar Üzerine Araştırma (Eylül 2022’de tamamlandı – Danışman: Dr. Dede)
Lisans Çalışması (TÜBİTAK STAR bursu) – Hande Parlak: Seri Elastik Eyleyiciler Üzerine Araştırma (Aralık 2022’de tamamlandı – Danışman: Dr. Aydın)
Lisans Çalışması (TÜBİTAK STAR bursu) – Musa Uzun: Mekanizma Testleri Üzerine Araştırma (Ekim 2023’te tamamlandı – Danışman: İbrahimcan Görgülü)
Trakya Üniversitesi ev sahipliğinde gerçekleştirilen 21. Ulusal Makina Teorisi Sempozyumu (UMTS 2023) kapsamında 13 Eylül 2023’te Medikal Uygulamalar Özel Oturumu düzenlenmiştir.